Location belongs in the IoT core
Most IoT initiatives start by connecting “things” (meters, sensors, trackers, machines). But they deliver operational value when those “things” are placed in context: where the device is installed, where an alarm happened, which site a maintenance team must reach, or which geo-zone rules should apply. In practice, location becomes a first-class attribute of the system’s “digital twin” of assets and operations, not an optional add-on. That’s why modern operational IoT architectures often structure data explicitly around assets, locations, and context rather than around raw telemetry streams alone.
For municipalities, the same point appears at ecosystem scale: smart city operations span water and wastewater, public transport, municipal energy, waste management, and public space/infrastructure — domains where incidents, workflows, and performance indicators are inherently spatial.
Location awareness inside an IoT platform typically supports four foundational capabilities (even before you build fancy applications):
- Provisioning and “installed base truth.” A device record is incomplete without an install location (coordinates, address, site, floor/room, cabinet/pole ID, GIS layer). This is core to auditing, maintenance dispatch, and asset lifecycle management.
- Operational workflows. Escalations and SLAs are often location-scoped: alerts in District A route to Team A, leaks within 200 m of critical infrastructure trigger a different playbook, or only show facility data to the responsible unit.
- Tracking and chain-of-custody. Whether it’s municipal equipment, containers, critical medical assets, or construction materials, location is the backbone of “where is it now,” “where has it been,” and “did it cross a boundary.”
- Security, compliance, and trust. Location is sensitive data, but it’s also a security control. NIST has documented geolocation as an input to enforcing constraints and reducing exposure in cloud scenarios (different problem domain, same principle: location enables policy).
This guide answers a practical engineering question: Which location technologies fit IoT constraints (power, cost, coverage, accuracy), and how do you assemble them into dependable location-based services (LBS)?
The location stack in IoT

“Location-based services” in IoT are rarely built on a single positioning method. Real systems behave like a stack, often blending:
- Global absolute positioning (GNSS and its augmentations),
- Network-based positioning (cellular, LPWAN),
- Local positioning (Wi‑Fi, BLE, UWB),
- Motion continuity (inertial dead reckoning/PDR), and
- location services (geocoding, map matching, geofencing, indoor maps).
A useful way to design is to decide what kind of location you truly need:
- Trajectory (movement history, dwell time, route compliance).
- Point coordinates (lat/long, sometimes altitude).
- Zone membership (“inside depot,” “in district,” “within geofence”).
- Relative proximity (“near anchor,” “closest doorway,” “approaching forklift lane”).
- Indoor semantics (building → floor → room → bay).
Practical comparison of IoT location technologies
In practical IoT deployments, each positioning technology occupies a distinct operational niche rather than competing directly on a single “accuracy” metric.
GNSS (baseline) is the default choice for outdoor positioning. It provides global absolute coordinates with a mature ecosystem and predictable behavior. It is best suited for fleets, mobile assets, and field operations where sky visibility is available. Its main limitations appear in urban canyons, indoors, and in power-constrained devices where continuous fixes are expensive.
Assisted GNSS (A-GNSS) improves GNSS usability rather than replacing it. By supplying orbital data and timing assistance over a network, it significantly reduces time-to-first-fix and improves sensitivity. It is particularly relevant for IoT devices that wake up periodically and need fast positioning. However, it still depends on GNSS signal availability and typically requires connectivity (or preloaded data in offline-assisted modes).
High-accuracy GNSS (PPP / RTK / PPP-RTK) extends GNSS into precision domains. These approaches use correction data to reach decimeter or even centimeter-level accuracy. They are appropriate for surveying, robotics, and certain industrial automation scenarios. The trade-off is complexity: correction services, convergence time, higher device cost, and more demanding antenna requirements.
Cellular positioning (Cell ID, E-CID, OTDOA) provides wide-area fallback where GNSS is unreliable. It leverages existing mobile networks, making it attractive for IoT devices already using LTE-M, NB-IoT, or 5G. It works reasonably well in dense urban environments and partially indoors. However, accuracy varies widely depending on network support, and implementation depends heavily on operator capabilities and device compatibility.
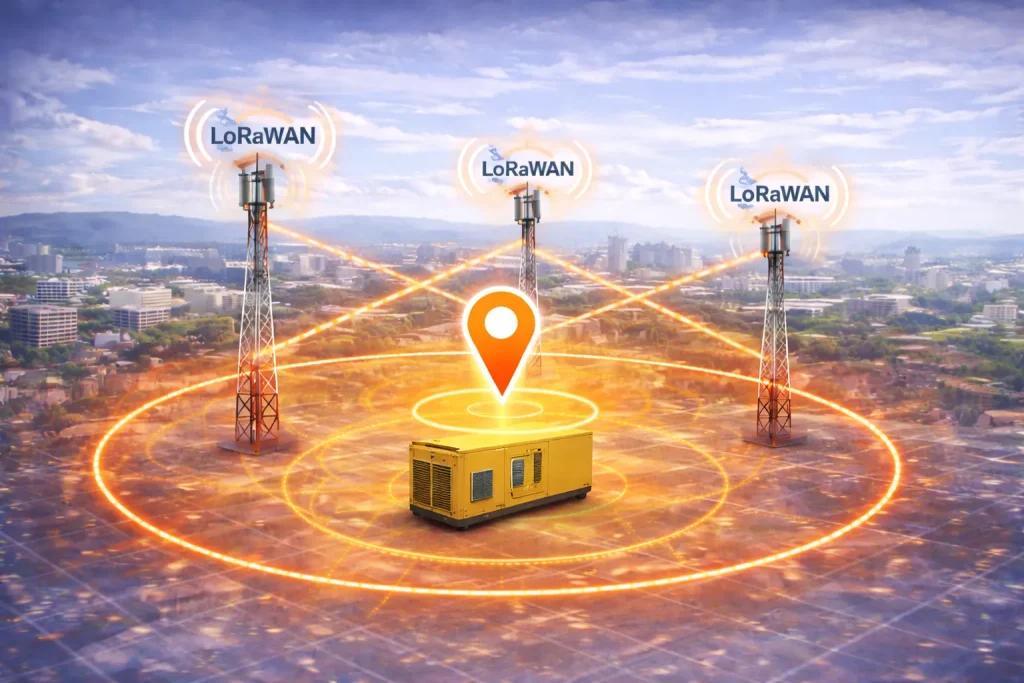
LoRaWAN geolocation (RSSI and TDoA) targets low-power, wide-area IoT scenarios. RSSI-based positioning provides very coarse location (often hundreds to thousands of meters), while TDoA improves this to tens or hundreds of meters when multiple synchronized gateways are available. It is well suited for geofencing, asset presence detection, and large-area monitoring rather than precise tracking.
Wi-Fi RSSI and fingerprinting are widely used indoors because Wi-Fi infrastructure already exists. These methods rely on signal strength patterns, often requiring calibration (fingerprinting). They can achieve reasonable room-level accuracy but require maintenance as environments change. Signal variability and multipath effects remain persistent challenges.
Wi-Fi RTT (ranging-based positioning) improves on RSSI by measuring actual signal travel time. This enables more deterministic indoor ranging and better accuracy when supported by both devices and access points. It is particularly relevant in controlled environments such as warehouses or industrial facilities, though ecosystem support is still not universal.
BLE RSSI is the simplest and lowest-cost indoor positioning method. It is widely used for proximity detection and zone-level awareness due to the ubiquity of BLE radios. However, it is inherently noisy and sensitive to environmental factors, making it unsuitable for precise positioning without heavy filtering and calibration.
BLE Direction Finding (AoA/AoD) enhances BLE positioning by using antenna arrays and phase measurements to estimate signal direction. This enables significantly better indoor localization compared to RSSI alone. It is appropriate for RTLS deployments requiring higher accuracy, but introduces RF design complexity, calibration requirements, and infrastructure considerations.
UWB (Ultra-Wideband, ToF/TDoA) is the high-precision option for indoor positioning. It provides very accurate ranging and is robust against multipath, making it suitable for industrial RTLS, logistics, and safety-critical applications. The trade-off is the need for dedicated infrastructure (anchors) and higher deployment cost.
Inertial navigation and dead reckoning (PDR/INS) does not provide absolute positioning but ensures continuity. Using accelerometers and gyroscopes, it tracks motion between known position fixes. It works without external signals, making it valuable in tunnels, indoors, or during GNSS outages. However, its error accumulates over time, so it must be combined with other positioning sources.
Key engineering takeaway
No single technology satisfies all IoT requirements. In practice:
- GNSS provides absolute outdoor positioning
- Cellular and LPWAN provide coverage and fallback
- Wi-Fi, BLE, and UWB provide indoor and local positioning
- Inertial systems provide continuity between fixes
Effective IoT location systems are therefore multi-layered and fused, with the platform responsible for selecting, validating, and combining sources into a usable operational location.
GNSS for IoT
Baseline GNSS

GNSS (Global Navigation Satellite Systems) provides global Positioning, Navigation, and Timing (PNT). GPS.gov describes GPS as a PNT utility built from the space, control, and user segments (satellites, monitoring/control, and receivers computing 3D position/time).
For IoT, GNSS remains the default for outdoor tracking: fleets, mobile equipment, container journeys, remote field operations, and any asset that regularly has sky visibility.
Assisted GNSS and offline assistance
A‑GNSS exists because GNSS receivers do not only need satellite signals—they also need navigation messages (ephemeris/almanac) and accurate time to compute a fix quickly. In practice, assistance data (and sometimes positioning protocols) are delivered over IP/cellular to reduce time-to-first-fix and improve sensitivity. The Open Mobile Alliance’s SUPL is widely recognized as an A‑GPS/A‑GNSS enabler (specification family).
In 3GPP networks, assistance and positioning are also formalized through standardized protocols (e.g., LPP), including procedures to deliver GNSS-related assistance data.
Offline assistance is the practical IoT variant where devices cache or prefetch orbital/assistance information (for example during a connectivity window) so they can get GNSS fixes later with limited or no data connectivity. The key trade-off is freshness: orbital data ages, so device and backend logic must handle validity windows and fall back when needed.
Higher accuracy GNSS: PPP, RTK, PPP‑RTK

If you need better than “meter-ish” GNSS, you move into correction services:
- PPP (Precise Point Positioning) uses precise satellite orbit/clock corrections and models to improve accuracy without a local RTK base station—often with a convergence time requirement.
- PPP‑RTK blends PPP concepts with RTK-style ambiguity resolution and network-delivered corrections; a 2022 review describes PPP‑RTK as aiming for centimeter-level service at scale.
The EU’s Galileo ecosystem is moving in this direction at the service layer. The European GNSS Service Centre describes Galileo HAS (High Accuracy Service) as providing free access (via signal and internet) to information needed for real-time PPP-based accurate positioning.
Trust and resilience
GNSS is powerful, but spoofing and interference risks are real. EUSPA explicitly notes growing concern about GNSS threats such as spoofing, and highlights Galileo OSNMA (navigation message authentication) as a step toward stronger trust and security for civilian applications. EUSPA states OSNMA Initial Service was declared operational on 24 July 2025.
For IoT architects, “trusted location” is not a checkbox—it’s a design pattern: cross-check GNSS with inertial motion, known site boundaries, network observations, and improbable jumps.
Indoor and campus positioning with Wi‑Fi and Bluetooth
Indoor environments invert the GNSS problem: you often have abundant radio infrastructure, but extreme multipath. Recent indoor positioning literature and surveys repeatedly emphasize interference, reflections, non-line-of-sight, and complex spaces as core challenges for indoor accuracy.
Wi‑Fi RSSI and fingerprinting

Wi‑Fi RSSI approaches typically infer distance or position from signal strength patterns. In practice, reliable indoor positioning often becomes a fingerprinting problem: you collect signal “signatures” at reference points and later match them. This can work well, but operationally you must maintain fingerprints as layouts, APs, and inventories change. Reviews of Wi‑Fi/BLE indoor positioning methods commonly compare RSSI, RTT, AoA, and more advanced measurements like CSI, showing the field’s ongoing move beyond simple RSSI.
Wi‑Fi RTT (ranging, not guessing)
Wi‑Fi RTT is a significant shift because it is time-based ranging rather than strength inference. Android documentation explains that Wi‑Fi RTT enables supported devices to measure distance to RTT-capable access points (or peers), building on IEEE 802.11mc (and newer 802.11az support in later Android versions).
This method can be attractive for industrial handheld workflows (warehouse picking, maintenance navigation, indoor wayfinding) where you control the environment and can deploy RTT-capable APs.
BLE RSSI: proximity at low cost

BLE RSSI is everywhere because BLE radios are cheap and common in tags, phones, and gateways. But BLE RSSI tends to be noisy in real buildings due to multipath, absorption by people and materials, and device diversity—making it best suited to proximity, zone detection, and “good enough” room-level use cases unless you invest heavily in calibration and filtering.
BLE Direction Finding (AoA/AoD): when you need better indoor geometry
Bluetooth 5.1 introduced direction finding capabilities that go beyond RSSI. Bluetooth’s official resources describe direction finding as a feature enhancement. Namely: Angle of Arrival (AoA) and Angle of Departure (AoD) methods that use antenna arrays and phase information rather than signal strength alone.
Engineering realities: AoA/AoD can materially improve indoor localization, but it is no longer “just beacons.” You’re designing antenna arrays, calibrating geometry, managing reflections, and often doing advanced estimation at the edge or in the backend. Experimental work on Bluetooth 5.1 direction finding shows measurable accuracy differences between indoor and outdoor conditions—another reminder that indoor multipath is the hard part.
Cellular positioning for IoT

Cellular positioning matters for IoT because many devices already use LTE/5G (including LTE‑M and NB‑IoT families), and because cellular works where GNSS struggles: indoors near windows, dense cities, and broad coverage footprints.
At the standards level, 3GPP defines UE positioning in LTE/E‑UTRAN and 5G/NG‑RAN. Both LTE (TS 36.305) and 5G NR (TS 38.305) describe positioning as a standardized enabling technology for location applications and location-based services.
“Cellular RSSI”: what’s actually usable
People often say “cellular RSSI,” but cellular positioning typically uses a broader suite of measurements:
- E‑CID (Enhanced Cell ID) methods incorporate radio measurements and network knowledge to improve over basic Cell ID. In NR positioning specs, E‑CID procedures involve measurements from the UE and/or the NG‑RAN node, and can include UE-reported measurements like RSRP/RSRQ.
- OTDOA (Observed Time Difference of Arrival) uses time-difference measurements from downlink signals. In TS 38.305, OTDOA positioning includes assistance data procedures and UE measurement reporting flows (LMF requests OTDOA measurements; UE provides them).
From an IoT system viewpoint, the biggest design questions are not “does OTDOA exist,” but:
Do you have operator support? Do your devices support the needed measurements? Do you control the SIM/operator relationship? Do you need deterministic availability across countries?
Assistance protocols and positioning control planes
For cellular-connected GNSS devices (common in asset trackers), standardized protocols exist for providing positioning assistance data. For example, ETSI-delivered LPP specifications describe procedures to request and provide assistance data (including periodic assistance data transfer patterns).
OMA SUPL similarly defines an IP-based location enabler stack, and academic literature has analyzed SUPL as an A‑GPS standard and described its architecture and operation.
LoRaWAN geolocation and LPWAN-friendly location services
LPWAN constraints (battery life, low uplink cadence, small payloads) force different location strategies. LoRaWAN’s value is not centimeter precision; it’s long-lived, low-maintenance location awareness for widely distributed assets.
LoRaWAN RSSI vs TDoA
The LoRa Alliance geolocation whitepaper describes two LoRaWAN geolocation methods:
RSSI-based (coarse positioning) and TDoA (finer accuracy). It explicitly states TDoA is well suited for low-cost, battery-powered end devices, and gives an accuracy range of ~20 m to 200 m depending on conditions, while RSSI can be ~1000–2000 m class.
Crucially, LoRaWAN TDoA gеolocation is network-assisted: location is derived when three or more gateways receive the same uplink and are accurately time-synchronized (often using GNSS at gateways), enabling multilateration based on time differences.
In IoT discussions “LoRa ToF” usually means time-difference-of-arrival at gateways rather than the two-way time-of-flight ranging used in UWB.
When LoRaWAN geolocation is the right tool
LoRaWAN geolocation shines when the business requirement is to know which region/site the asset is in, detect boundary crossings, and do it on a battery budget.
The LoRa Alliance paper highlights that duty-cycle and uplink frequency constraints affect moving assets: more frequent location requires more transmissions and more energy.
It even recommends using application knowledge (like map matching constraints) to improve results—an early hint that LBS quality comes from systems thinking, not just radios.
Cloud-assisted LPWAN geolocation using GNSS/Wi‑Fi/BLE scanning
A modern hybrid pattern is “scan, don’t solve on-device.” e.g. a LoRa transceiver with a multi-constellation GNSS scanner and a passive Wi‑Fi AP MAC address and BLE scanner, designed for geolocation applications where the cloud solver computes location to reduce device power consumption.
This approach is increasingly relevant for battery trackers: the device collects brief “observations” (GNSS snapshots, Wi‑Fi or BLE identifiers) and lets backend services turn them into a location estimate.
Dead reckoning, inertial navigation, and sensor fusion
Inertial dead reckoning basics

In GNSS-denied or indoor transitions, motion sensors provide continuity. Pedestrian Dead Reckoning (PDR) on smartphones is a common reference design: it uses accelerometers, gyros, and often magnetometers to estimate steps and heading.
The universal drawback is error accumulation (drift). Recent PDR and inertial work continually addresses denoising, drift modeling, and heading correction because the raw IMU data biases integrate into growing position error.
Sensor fusion as the operational answer
In IoT location systems, dead reckoning is rarely used alone. It is used as the “glue” between absolute fixes:
- GNSS provides occasional absolute anchors outdoors.
- Wi‑Fi RTT / BLE AoA / UWB provide indoor anchors.
- Map constraints clean up impossible tracks (e.g., you cannot walk through walls).
Academic and applied literature on GNSS/IMU fusion frequently uses Kalman-filter family methods, such as error-state Kalman filtering and smoothing, to combine GNSS and IMU data for robust localization under GNSS errors.
Building location-based services across smart cities and industry
A location technology becomes an LBS only when you wrap it in services and governance: coordinate systems, maps, rules, data quality controls, and APIs.
The “services layer” you should design explicitly
Geocoding and reverse geocoding. Turning coordinates into an address or asset context is non-trivial. For example, Nominatim (OpenStreetMap geocoding) documents that reverse geocoding returns the closest suitable OSM object rather than computing a perfect address for an exact coordinate — important for engineers who expect deterministic address outputs.
Map matching. If you track vehicles or flows, map matching can stabilize noisy location traces against road/path networks. Surveys describe map matching as a major research and engineering area and categorize algorithms by scenario and matching model.
Geofencing and zone logic. Many IoT use cases don’t need exact coordinates; they need boundary events. LoRaWAN geolocation guidance explicitly calls out geofencing suitability for normally stationary assets.
Indoor mapping and semantics. Coordinates are not enough inside buildings. You need floor plans, anchor placement models, and an operational process for changes.
Trust scoring. Treat location like telemetry with quality metrics: source type, dilution/geometry, recency, speed plausibility, tamper indicators, authentication availability (e.g., OSNMA in GNSS), and cross-sensor consistency.
Smart city use cases

Municipal IoT deployments typically span both fixed infrastructure and mobile assets across domains such as water and wastewater, public transport, municipal energy, waste management, and public space/infrastructure.
Across these domains, location-based services (LBS) commonly cluster into:
Infrastructure incident response (water, energy, public space).
A leak alarm is most actionable when it is automatically mapped to a pipe segment, nearest valve, and responsible operational unit. That requires device install location quality at provisioning time and reverse geocoding/GIS enrichment at operation time.
Mobile operations and fleet coordination (public transport, municipal vehicles).
GNSS is primary outdoors, but depots and tunnels drive a need for fallback: cellular positioning, inertial continuity, or yard-level UWB for precise depot operations. Cellular positioning standards (OTDOA/E‑CID) exist specifically to enable location applications through network measurements.
Waste logistics, bins, and “where is the asset really.”
Bins and containers often need location at handoff moments (pickup/drop), not continuous tracking. That points toward lower-power solutions: periodic GNSS, LoRaWAN TDoA (when gateway density exists), or “scan and solve” LPWAN approaches.
Cross-department situational awareness.
City-scale coordination is a data governance problem as much as a tech problem; smart city platform concepts emphasize unifying operational data with controlled access across municipal entities.
Industrial verticals and site operations
Industrial IoT deployments span a wide range of environments, including commercial buildings/real estate, manufacturing, logistics/warehousing, energy/distributed infrastructure, healthcare/assisted care, construction/engineering, mobile assets/fleet operations, and specialized infrastructure.
Across these, LBS typically cluster into the following categories:
RTLS in logistics and manufacturing (forklifts, WIP, tools, pallets).
UWB is often chosen when you need high accuracy and repeatability in industrial environments; industry-focused RTLS research highlights UWB’s attractiveness due to high accuracy and operation in challenging environments, including NLOS (non line-of sight) cases.
Healthcare (asset availability, staff safety, patient flow).
BLE RSSI is common for coarse presence (“in room / in zone”), while BLE AoA or UWB supports higher integrity workflows (e.g., “which bed bay,” “closest device”). BLE indoor positioning research repeatedly stresses indoor multipath challenges and the evolution beyond RSSI.
Construction and distributed projects (materials, machines, compliance zones).
Construction adds harsh RF dynamics and frequent layout changes. LoRaWAN geolocation can support coarse yard-level tracking where gateway networks exist, while GNSS dominates open-sky equipment tracking.
Energy and critical infrastructure (remote sites, safety, maintenance).
The dominant constraint is usually coverage + resilience: GNSS for outdoor assets, cellular for backhaul and network-derived hints, and strict governance for where operational data lives.
Implementation principles for robust IoT location systems
A recurring failure mode in location-enabled IoT deployments is treating positioning as a feature rather than a system. The following principles reflect practical engineering constraints observed across real deployments.
Treat location as probabilistic data, not absolute truth.
All positioning methods produce estimates with varying uncertainty. This is especially visible in RSSI-based techniques, where signal fluctuations, multipath, and environmental changes introduce significant variance. System design should therefore incorporate confidence levels, filtering, and probabilistic zone logic rather than relying on single-point accuracy assumptions.
Design for multi-source fallback and sensor fusion from the outset.
No positioning technology is universally reliable. GNSS degrades in indoor and dense urban environments; inertial methods accumulate drift over time; LPWAN geolocation depends on network geometry; Wi-Fi and BLE methods depend on infrastructure and device support. Robust systems combine multiple sources and dynamically select or fuse them to maintain continuity and reliability.
Model and manage infrastructure as a first-class component.
Positioning performance is tightly coupled to infrastructure quality. This includes accurate coordinates of anchors, access points, and gateways; consistent time synchronization (especially for time-based methods such as TDoA); and controlled versioning of site layouts. Infrastructure errors often propagate directly into positioning errors, making lifecycle management of infrastructure data essential.
Incorporate trust, validation, and resilience mechanisms.
Position data is susceptible to anomalies, including signal interference and intentional spoofing. Systems should not rely on a single source of truth but instead implement cross-validation across sensors, detect implausible movements or jumps, and apply consistency checks. Emerging mechanisms such as GNSS signal authentication improve trust but do not eliminate the need for system-level validation.
Address privacy and governance requirements early in the design.
Location data can reveal sensitive operational patterns or identify individuals indirectly. Regulatory frameworks such as GDPR explicitly cover device-related identifiers and derived data. As a result, location systems must include data minimization strategies, access control, retention policies, and clear governance models from the beginning rather than as an afterthought.
Key takeaways
Location-based services in IoT are not one technology; they are an engineered stack combining GNSS (often assisted), cellular/LPWAN positioning, Wi‑Fi/BLE/UWB indoor methods, and sensor fusion—with a services layer (geofencing, reverse geocoding, map matching) that makes location operationally usable.
For IoT platforms targeting cities and industry, location awareness is a core capability because it underpins provisioning truth, cross-team operations, asset tracking, and governed visibility—especially in multi-site, multi-team environments.
References
- Elsheikh, M.; Iqbal, U.; Noureldin, A.; Korenberg, M. (2023)
The Implementation of Precise Point Positioning (PPP): A Comprehensive Review. Sensors 2023, 23, 8874 - Li, X., Huang, J., Li, X. et al. (2022)
Review of PPP–RTK: achievements, challenges, and opportunities. Satell Navig 3, 28 (2022) - Martín-Frechina, S.; Dura, E.; Miralles, I.; Torres-Sospedra, J. (2025)
From Fingerprinting to Advanced Machine Learning: A Systematic Review of Wi-Fi and BLE-Based Indoor Positioning Systems. Sensors 2025, 25, 6946 - Ghaemifar M.;Motie S.; Moosaviun S.M.; Nemati Y.; Ebadollahi S.
Bluetooth low energy for indoor positioning: Challenges, algorithms and datasets, Automation in Construction, vol 177, 2025, 106316 - Google. (n.d.)
Wi-Fi RTT (IEEE 802.11mc, IEEE 802.11az), Android Open Source Project - European Telecommunications Standards Institute (ETSI) (2024)
ETSI TS 138 305 V19.0.0, “5G; NR; Stage 2 description of UE positioning” - Kuang, J.; Niu, X.; Chen, X. (2018)
Robust Pedestrian Dead Reckoning Based on MEMS-IMU for Smartphones. Sensors 2018, 18, 1391 - Zhao G.; Wang X.; Zhao H.; Jiang Z.(2023)
An improved pedestrian dead reckoning algorithm based on smartphone built-in MEMS sensors, AEU – International Journal of Electronics and Communications, vol 168, 2023, 154674 - Yin, Y.; Zhang, J.; Guo, M.; Ning, X.; Wang, Y.; Lu, J.
Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter. Sensors 2023, 23, 3676 - Chao, P.; Xu, Y.; Hua, W.; Zhou, X. (2019)
“A Survey on Map-Matching Algorithms,” arXiv:1910.13065, 2019. - European Parliament and Council of the European Union. (2016)
Regulation (EU) 2016/679 (General Data Protection Regulation)
Related Resources
- SmartWhere Industry: SmartWhere Industry platform overview
- SmartWhere City: SmartWhere City platform overview